 HOME
HOME  RESEARCH
RESEARCH This page provides a list of on-going major research topics and projects. Please click on a Research Topic for further details.
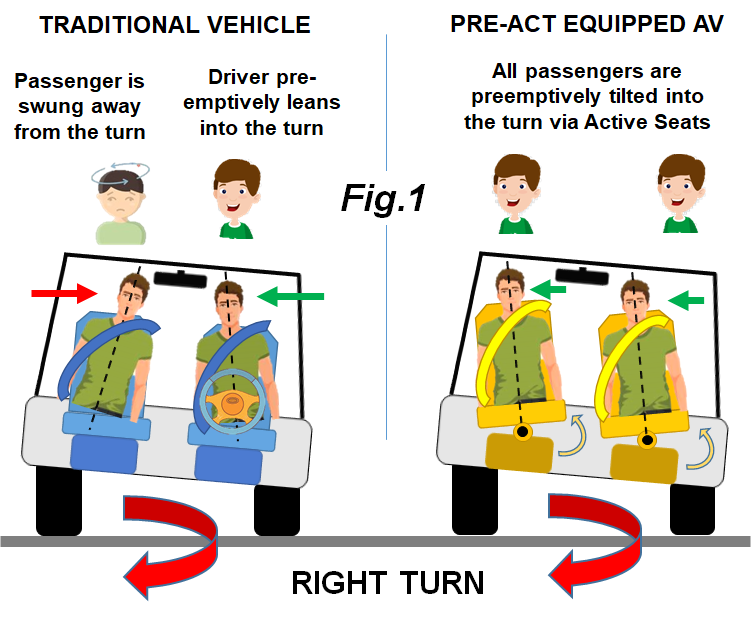
Motion Sickness Mitigation in Autonomous Vehicles using Preemptive Control of Active SystemsWe are actively researching motion sickness mitigation solutions for passengers of autonomous vehicles, especially mitigation solutions that leverage preemptive control of active systems within the vehicle. Autonomous vehicles (AVs) create the opportunity for passengers to perform productive tasks during their commutes. However, motion sickness can be an impeding factor in this transformation as it prevents passengers from performing their tasks effectively. It is estimated that motion sickness afflicts one in three US adults travelling in passenger vehicles. The aim of this project is to design, build, and test a motion sickness mitigation systems such as active seat, active restraint, active passenger stimuli, and active productivity interface. The motion sickness mitigation system leverages big data driven insights and machine learning to determine the optimal commands to control the active systems to improve passenger comfort, productivity, and mitigate motion sickness. Past, on-going, and future projects in this research area include: (1) literature review of the state of the art in motion sickness mitigation, and motion sickness modelling, (2) development of motion sickness simulation models, (3) design, analysis, and fabrication of active seat system, (4) design of experiment, data analysis of experimental results of active seat system on mitigating motion sickness using instrumented anthropomorphic dummy, and (5) human subject validation of the motion sickness mitigation solutions. |
 |
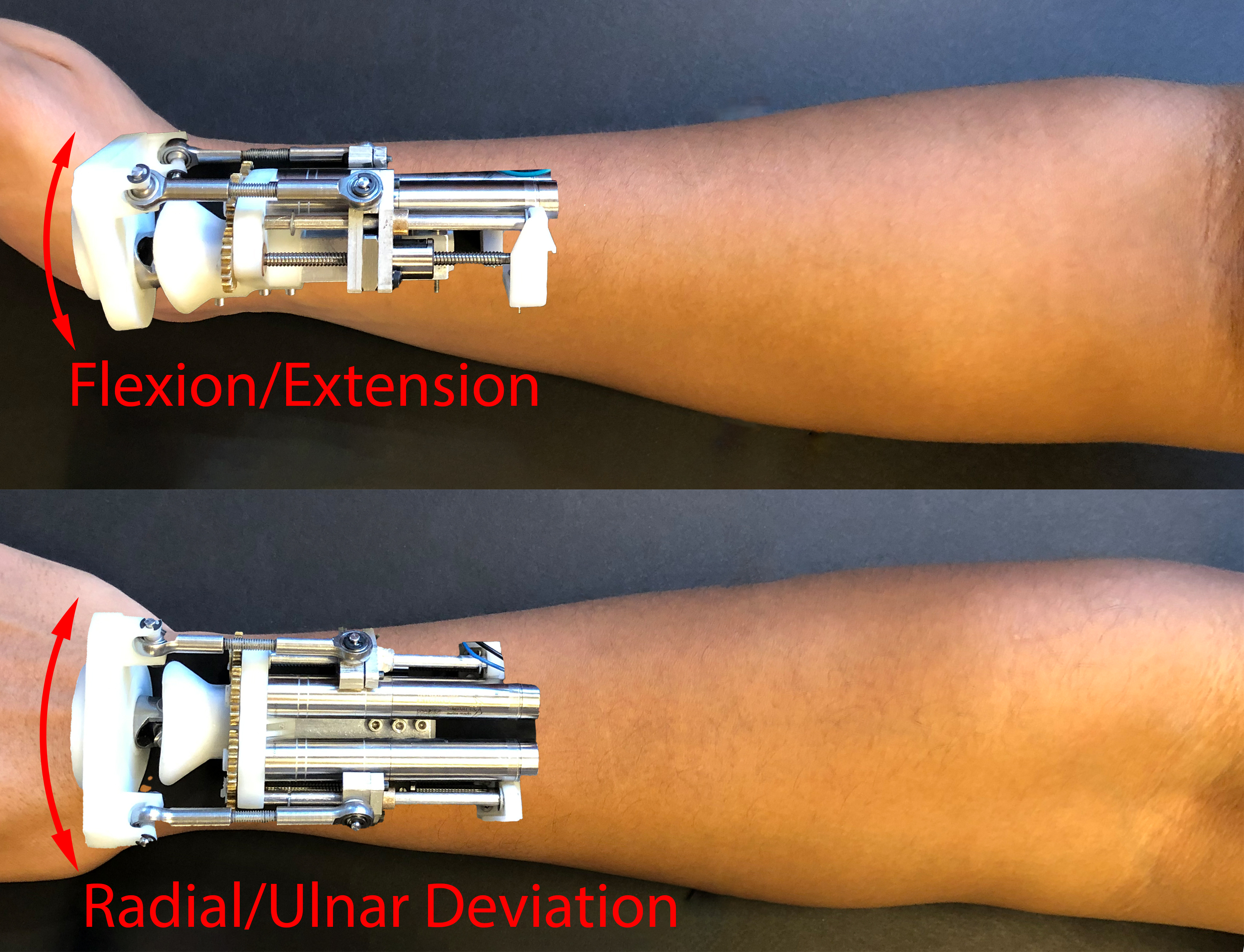
Electrically Powered Upper Limb ProsthesesWe are actively conducting research in the design of electrically powered upper limb prostheses, including prosthetic hands and wrists. Research has demonstrated that existing upper limb prostheses are unable to meet user needs in several areas. Upper limb prosthesis hardware in particular (consisting of actuators, transmissions, mechanisms such as fingers, structural components, microcontrollers, batteries, drivers, etc.) is unable to meet user needs. Prosthetic hands and wrists are typically too heavy and have insufficient dexterity, low speed, and inadequate strength. The aim of our research is to design, build, and test upper limb prostheses that resolve these challenges by utilizing actuator, transmission, and mechanism options that can offer considerably higher speed, strength, and dexterity performance for a lower weight. Past and ongoing research focuses on 1. 3 degree of freedom prosthetic wrist, 2. Lightweight prosthetic gripper, 3. High dexterity prosthetic hand, and 4. Novel high performance transmissions. |
 |
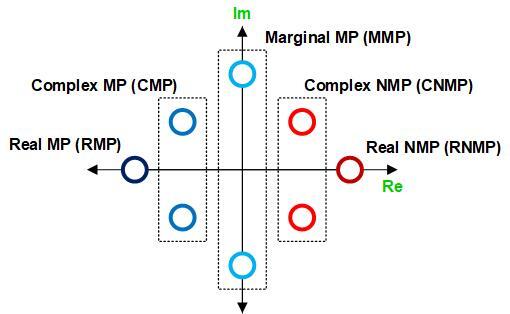
Non-Minimum Phase Zeros of Flexible Systems
Flexible system dynamics plays a vital role in the performance of several motion and vibration control applications such as space structures, rotorcraft blades, hard-disk drives, flexure mechanisms, and motion systems with transmission compliance. These applications often require the use of feedback and feedforward controls in an attempt to achieve desirable dynamic performance, which generally includes high speed, low settling time, strong disturbance rejection, low sensitivity to modeling uncertainties, and stability robustness. |
 |
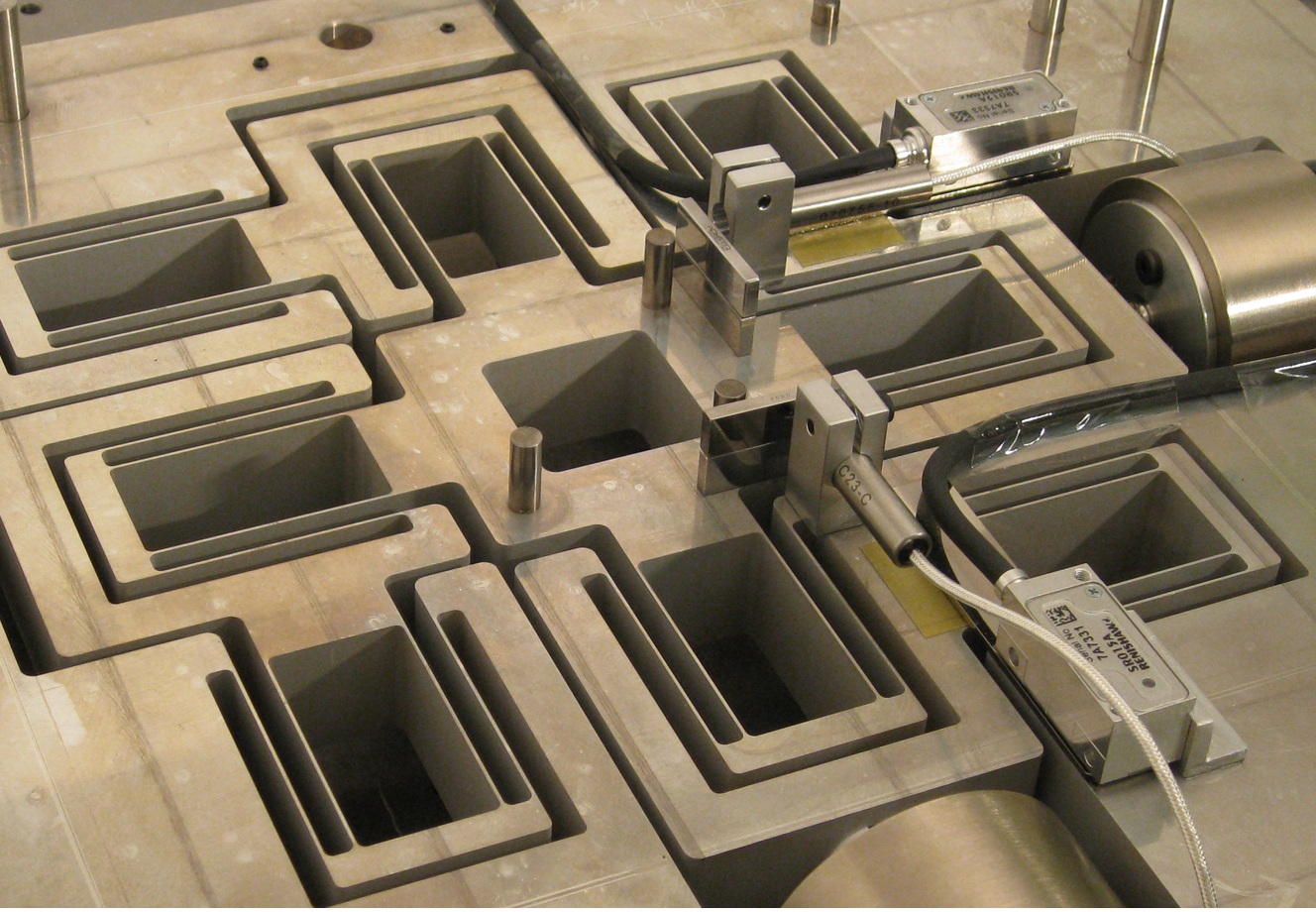
High Performance Nanopositioning for Nanomanufacturing and NanometrologyWe are conducting research on all aspects of flexure-based nanopositioning systems with the goal of identifying and overcoming fundamental barriers that have traditionally restricted the performance of these systems in terms of range, speed, precision, and resolution. In particular, we focus on flexure mechanism design, structural mechanics and dynamics, actuator design and integration, sensing arrangements and integration, advanced control schemes, and system-level conception and optimization. Via this work, we have demonstrated very large dynamic range in single and multi-axis nanopositioning system (10mm range per axis, while maintaining < 10nm position resolution), which has resulted in the HIPERNAP technology. |
 |
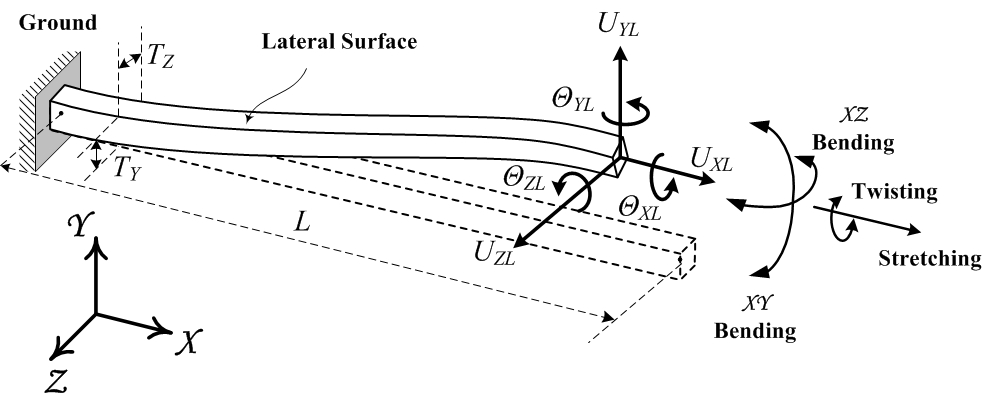
Closed-Form Parametric Modeling of Flexure Elements and MechanismsIn this research, we are developing highly generalized yet accurate closed-form parametric load-displacement models for various flexure elements, while taking into account key geometric non-linearities. This modeling framework, collectively referred to as the Beam Constraint Model (BCM), provides the basis for an analytical characterization of the constraint behavior of basic flexure elements, including the planar beam flexure, spatial beam flexure, and spatially loaded flexure strip. Since these flexure elements serve as building blocks in flexure mechanisms, their constraint behavior directly impacts the motion performance such as trajectory, range of motion, stiffness, and error motions of the resulting mechanism. The utility of this modeling framework for flexure mechanism design lies in the physical and analytical insights that it offers, the parametric and geometric optimization that it enables, and the fundamental performance tradeoffs that it reveals. |
 |
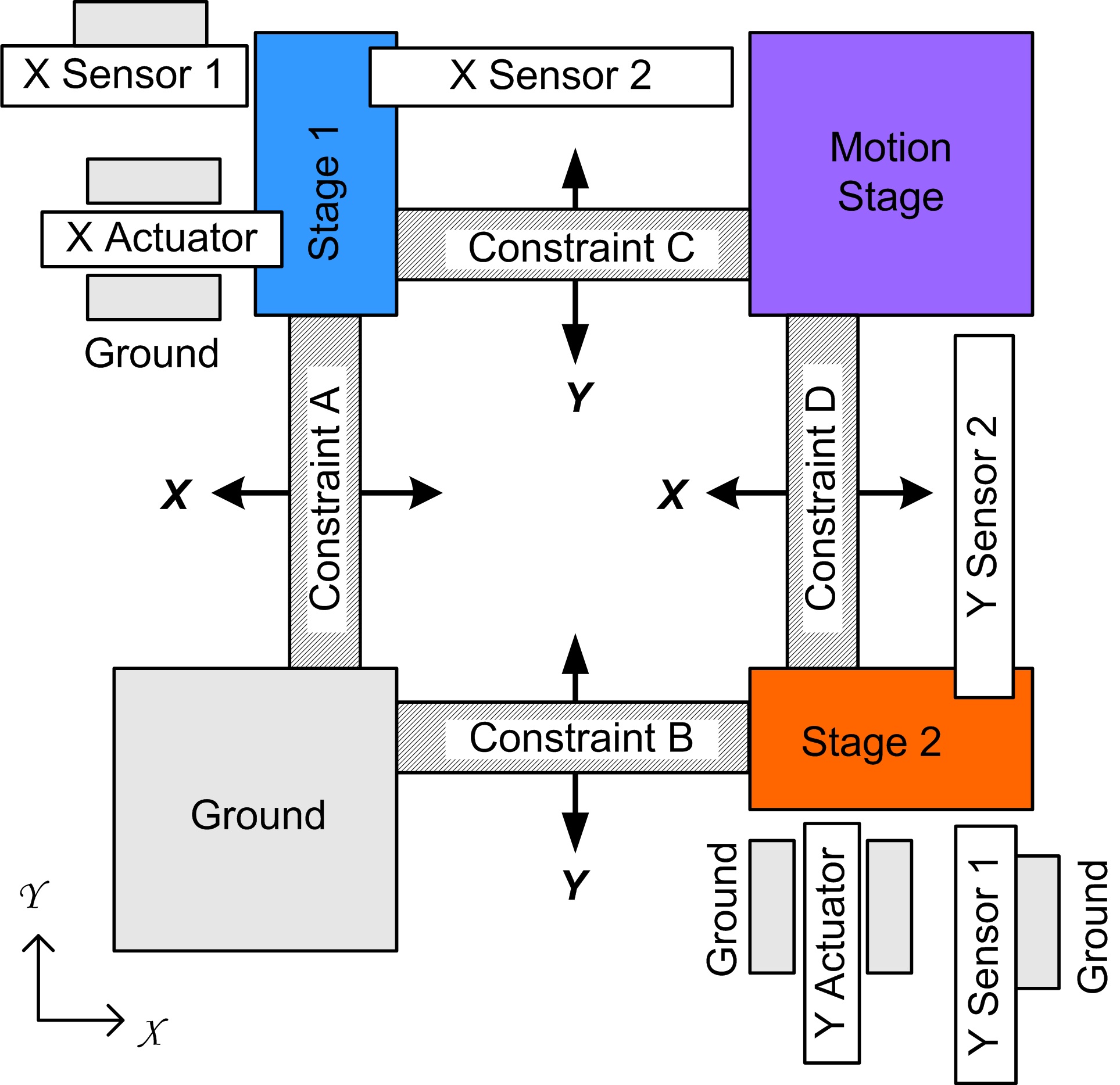
Synthesis of Multi-axis Parallel Kinematic Flexure MechanismsWe are investigating a new flexure mechanism design methodology inspired by Elastic Averaging seen in nature. Flexure mechanisms derive motion from material elasticity rather than traditional joints, resulting in high repeatability, design simplicity, and lower costs. The traditional design methodology for the synthesis and optimization of flexure systems is based on Exact Constraint principles, which restrict the solution space by not recognizing the unique advantages of distributed compliance. This research creates a mathematical foundation for Elastic Averaging to enable the effective use of distributed compliance in highly over-constrained structures that are inherently robust and high-performing despite local defects. Furthermore, emphasis is placed on generating multi-axis parallel-kinematic configurations that provide highly decoupled motions along the degrees of freedom, high stiffness along the degrees of constraint, and integration with ground-mounted transducers. This has enabled novel flexure designs for use in nanopositioning systems (HIPERNAP technology), articulating laparoscopic medical devices (FlexDex technology), MEMS devices, and rehab robots. |
 |
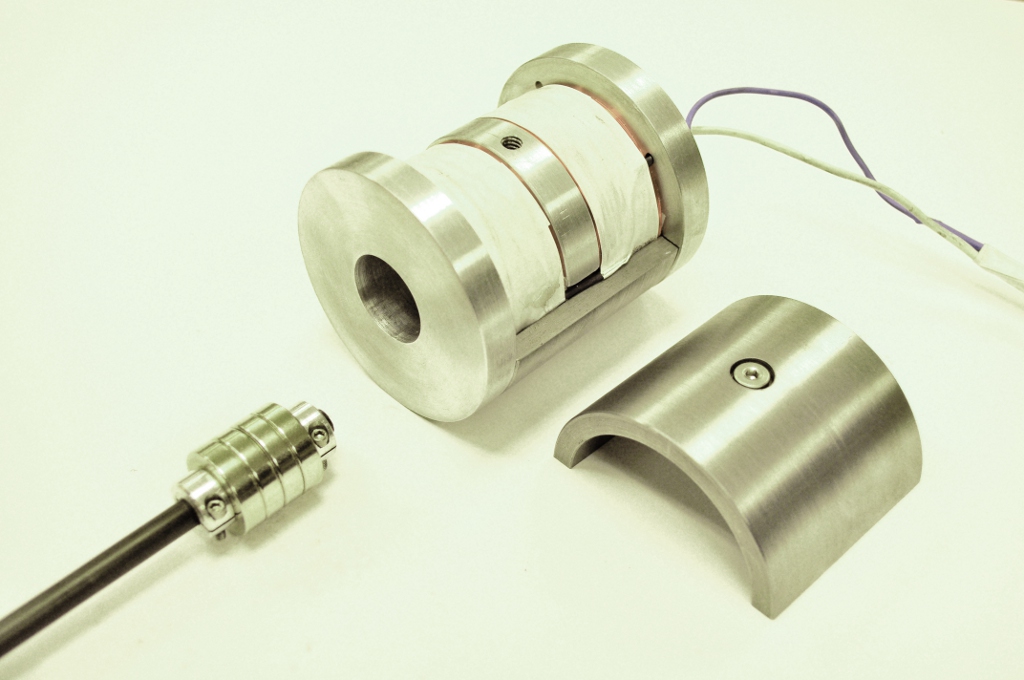
Electromagnetic Energy Conversion MachinesElectromagnetic energy conversion is essential in various applications. Examples include the widespread use of electromagnetic actuators in automotive applications or the generators in wind turbines. However, actuators and generators are often designed in isolation from the system in which they are employed, forcing engineers to make system-level design compromises and reducing overall system performance. The goal of this research was to create a multi-disciplinary modeling and design process to optimally integrate actuators or generators with the entire system to increase efficiencies and eliminate redundancies. This research led to the design and development of high performance moving magnet actuators that provide greater force while maintaining low moving mass and power consumption, and incorporated within the high performance nanopositioning (HIPERNAP) technology. |
 |
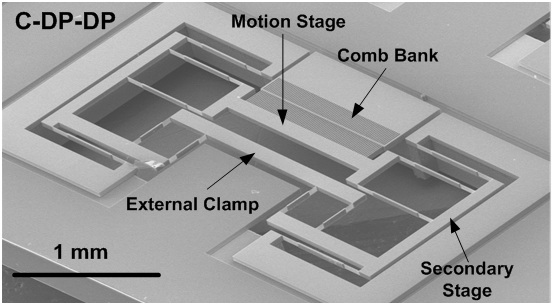
High Performance Electrostatic Comb-Drive Micro-ActuatorsIn past projects, PSDL has developed electrostatic comb-drive micro-actuators that provide large stroke while maintaining small footprint and actuation effort. Traditional electrostatic comb-drive actuators, although easy to fabricate and integrate within MEMS, suffer from limited stroke and force because of sideways snap-in instability. On the other hand, electromagnetic and piezoelectric actuators provide better actuation performance but are considerably more challenging to fabricate and integrate in MEMS. Our inventions have helped overcome these long-standing tradeoffs between ease of fabrication and performance. Via the use of fundamentally new flexure mechanisms for actuator guidance, we have mitigated sideways instability in electrostatic comb-drive actuators, enabling multi-fold greater stroke, compared to the state of the art in comb-drive actuators, while maintaining small actuation effort as well as ease of fabrication. These actuation advances serve as potential enablers in applications such as micro-switches for consumer products, optical switches in the networking industry, probe-based data storage, micro-scale energy harvesting, and video-rate AFM. |
 |
Minimally Invasive Medical Device TechnologyIn past projects, we have worked on the development of affordable medical device technologies that enable the wider adoption of minimally invasive surgery (MIS). In particular, we investigate novel means for actuation, transmission, and articulation with emphasis on multi-DoF mechanisms, parallel kinematic configurations, flexible end-effectors, actuators, and control algorithms. Past projects in this area include: 1. FlexDex, an enhanced-dexterity laparoscopic tool technology that offers intuitive control via a purely mechanical design. 2. Robotic guidance of endo-illuminators and endoscopes in vitreo-retinal surgery to enable bi-manual surgery. 3. A compact, low-cost minimally invasive skin tissue biopsy device. |
 |
Research Archives |
|
Shorya Awtar Sc.D. Research (Aug 2000 - Feb 2004) |
|
Shorya Awtar M.S. Research (Sept 1998 - July 2000) |