 HOME
HOME  RESEARCH
RESEARCH Electrically Powered Upper Limb Prostheses
|
We are actively conducting research in the design of electrically powered upper limb prostheses, including prosthetic hands and wrists. Research has demonstrated that existing upper limb prostheses are unable to meet user needs in several areas. Upper limb prosthesis hardware in particular (consisting of actuators, transmissions, mechanisms such as fingers, structural components, microcontrollers, batteries, drivers, etc.) is unable to meet user needs. Prosthetic hands and wrists are typically too heavy and have insufficient dexterity, low speed, and inadequate strength. The aim of our research is to design, build, and test upper limb prostheses that resolve these challenges by utilizing actuator, transmission, and mechanism options that can offer considerably higher speed, strength, and dexterity performance for a lower weight. Past and ongoing research focuses on 1. 3 degree of freedom prosthetic wrist, 2. Lightweight prosthetic gripper, 3. High dexterity prosthetic hand, and 4. Novel high performance transmissions.
|
PUBLICATIONS
| J40. | Damerla, R., Qiu, Y., Sun. T. M., Awtar, S., 2021, "A Review of the Performance of Extrinsically Powered Prosthetic Hands.", IEEE Transactions on Medical Robotics and Bionics, 3 (3), DOI: 10.1109/TMRB.2021.3100612 |
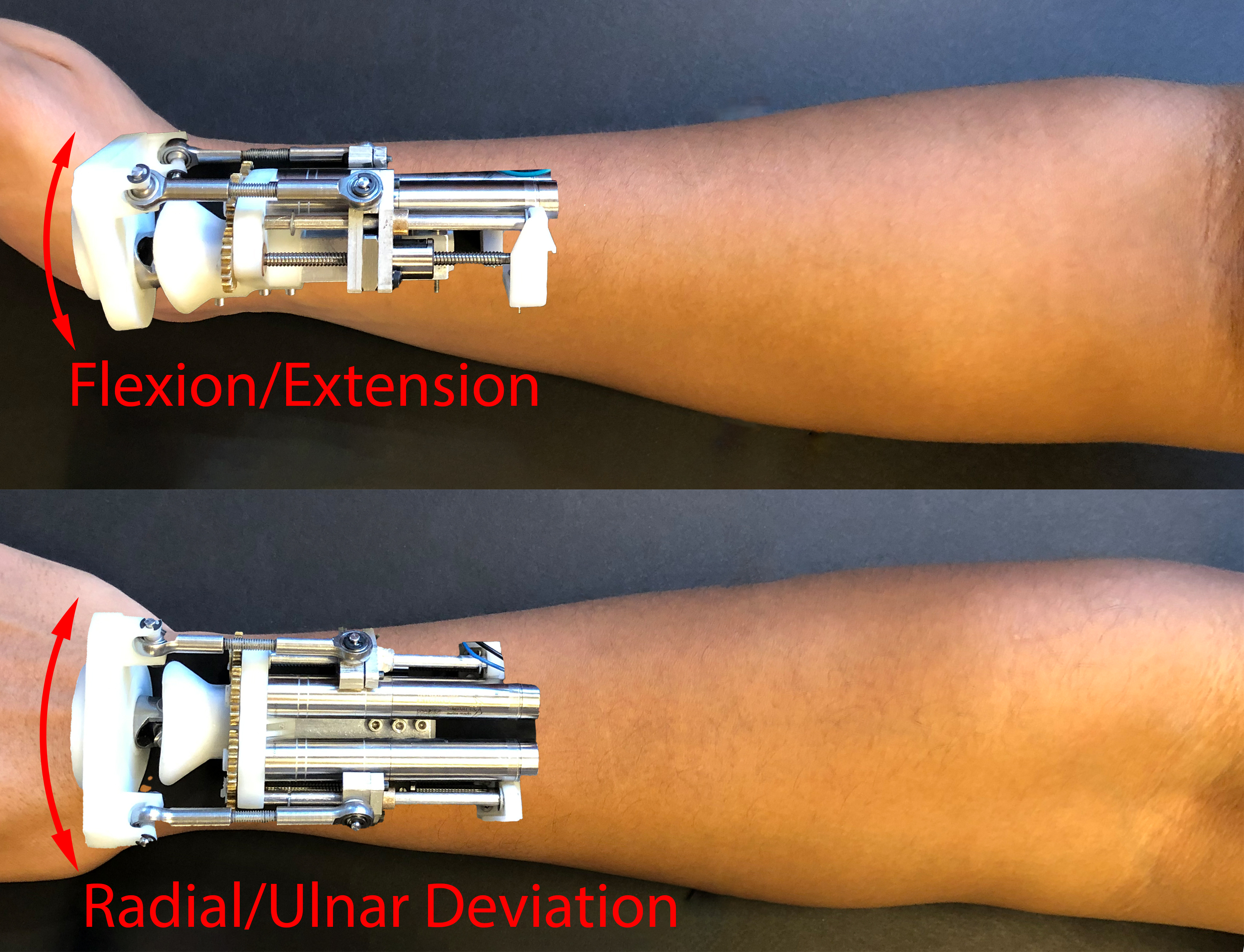
| J43. | Damerla, R., Singhal, A., Rice, K., Rubio-Ejchel, D., Miro, M., Braucher, E., Foote, J., Bourai, I., Yang, K., Guang, H., Iakimovitch, V., Sorgenfrei, E., Awtar, S., 2021, "Design, Fabrication, and Testing of a Novel, High-Performance 2 DoF Parallel Kinematic Prosthetic Wrist", IEEE Transactions on Mechatronics, in review |
| JXX. | Singhal, A., Damerla, R., Lusky, S. J., Geralds, L., Braucher, E., Yang, K., Rice, K., Rubio-Ejchel, D., Awtar, S., 2021, "Design, Fabrication, and Testing of a High-Performance, Low-Weight Prosthetic Gripper",IEEE Transactions on Robotics, in preparation |